Bàsics del control direccional del vehicle
Ignasi Puig Renalias
16 d’agost de 2024
En aquesta ocasió parlarem d’un tema de certa complexitat, en què hi intervenen molts factors i en el qual es podrem trobar infinitats de configuracions diferents. Provarem doncs, de simplificar-ho tant com es pugui i explicar alguns dels principis que es tenen en compte a l’hora de dissenyar el grup de direcció i suspensió.
Principi d'Ackermann
Per començar a entendre de què va l’assumpte, hem de parlar d’Ackermann. Si adoptéssim una perspectiva zenital des d’on observéssim el gir teòric d’un vehicle, podríem veure que la roda exterior descriu un radi major que la roda interior. Davant d’aquest cas, si les dues rodes giressin amb el mateix angle (direcció paral·lela), com que l’interior recorre un arc menor que l’exterior, ens trobaríem que la primera acabaria patinant. Això provocaria un arrossegament de l’eix amb la pèrdua de direccionabilitat corresponent.

Direcció paral·lela
A més, per assegurar l’estabilitat, el centre de gravetat i de tots aquells elements que es desplacin amb ell hauran de comptar amb un centre instantani de rotació fixe. Per a un cotxe, aquest punt descrit es pot determinar com la ubicació on es creuen totes les perpendiculars a les rodes. Per tant, per tal que totes les perpendiculars es tallin en un mateix indret, que serà el centre de rotació instantani i permetrà una rotació pura, s’ha de donar un angle de guiat diferent a la roda exterior respecte a l’interior. Aquesta configuració se la coneix com a geometria d’Ackermann.
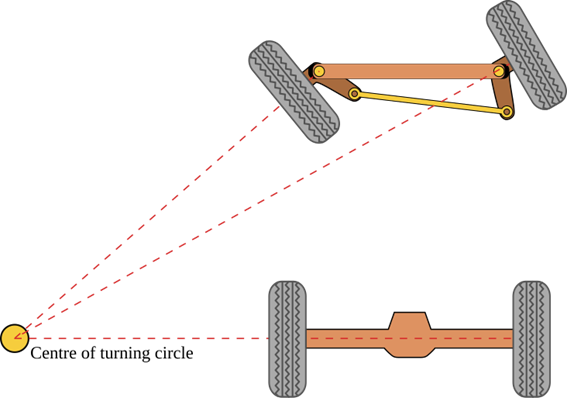
Direcció amb Ackermann aplicada
User:Bromskloss, CC BY-SA 3.0, [https://commons.wikimedia.org/wiki/File:Ackermann.svg]
El principi d’Ackermann treballa de manera que adapta la diferència d’angles de guiat segons el radi de la corba a descriure. Com més petit sigui aquest (o més tancat sigui el viratge), major serà la disparitat entre la trajectòria descrita per la roda exterior i interior.
En les configuracions reals de vehicles es tenen en compte els angles de deriva que prenen tant els pneumàtics davanters com els posteriors (entre altres variables), amb lo qual els sistemes dissenyats varien lleugerament.
Angle de guiat (Steering)
Tal i com s’ha vist en l’apartat anterior, l’angle de guiat és el format per una roda de l’eix directriu amb el pla longitudinal del vehicle vist des de dalt. Amb els casos en què s’empri una arquitectura tipus Ackermann, l’angle interior serà major que l’exterior.
Els angles de guiat estaran parametritzats tenint en compte, bàsicament, la distància entre eixos i l’ample de via del automòbil a estudiar.
Angle de caiguda (Camber)
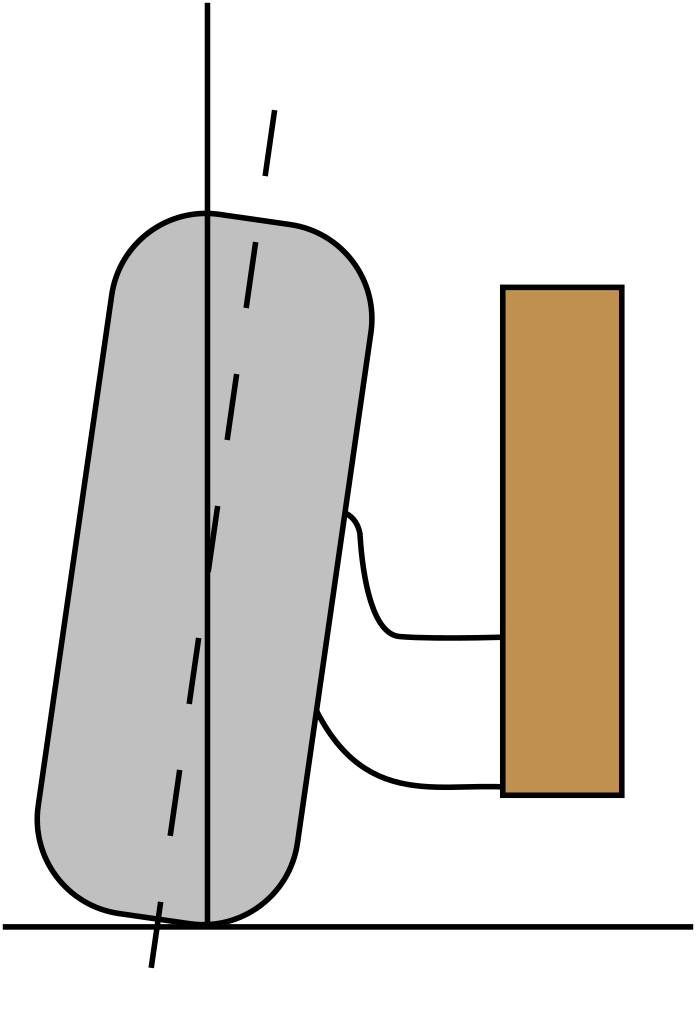
Angle de caiguda
Camber_angle.jpg: GRAHAMUKderivative work: McSush, CC BY-SA 3.0, [https://commons.wikimedia.org/wiki/File:Cambe_angle.svg].
Amb el vehicle observat des d’un punt de vista frontal, és l’angle generat per la roda i la vertical. Es juga amb el disseny d’aquesta inclinació per diferents motius:
- Per reduir el braç de palanca entre la petjada del pneumàtic i l’eix de l’articulació de la mangueta per tal que l’angle de sortida pugui ser menor.
- Per contrarestar l’esforç que tendeix a separar les rodes de la carretera per les irregularitats que pugui tenir aquesta última.
- Per a reduir el centre de gravetat del vehicle.
- Per augmentar la petjada dels pneumàtics en prendre una corba.
S’estableix que la caiguda és positiva quan la part superior de la roda es troba inclinada cap a la part exterior del vehicle i negativa quan la inclinació apunta cap a dins.
A trets generals (i sempre parlant en estàtic), una caiguda lleugerament positiva afavoreix el desgast regular del pneumàtic i la reducció de la resistència a la rodadura. En canvi, per millorar el grip lateral quan s’està negociant un revolt, són aconsellables caigudes negatives.

Canvis de la caiguda en un viratge
Posem per cas un cotxe amb suspensió independent que pren una corba. En el moment en que això passa, la caiguda varia: la roda exterior tendeix a un angle positiu i la interior a un angle negatiu, amb la pèrdua corresponent de petjada de pneumàtic i, per tant, també d’adherència. Per tal de compensar aquest fenomen, les suspensions es solen dissenyar de manera que en compressió, és a dir, el pneumàtic exterior, prengui caiguda negativa i, en extensió (pneumàtic interior), la caiguda tendeixi a positiva.
Angle de convergència (Toe)
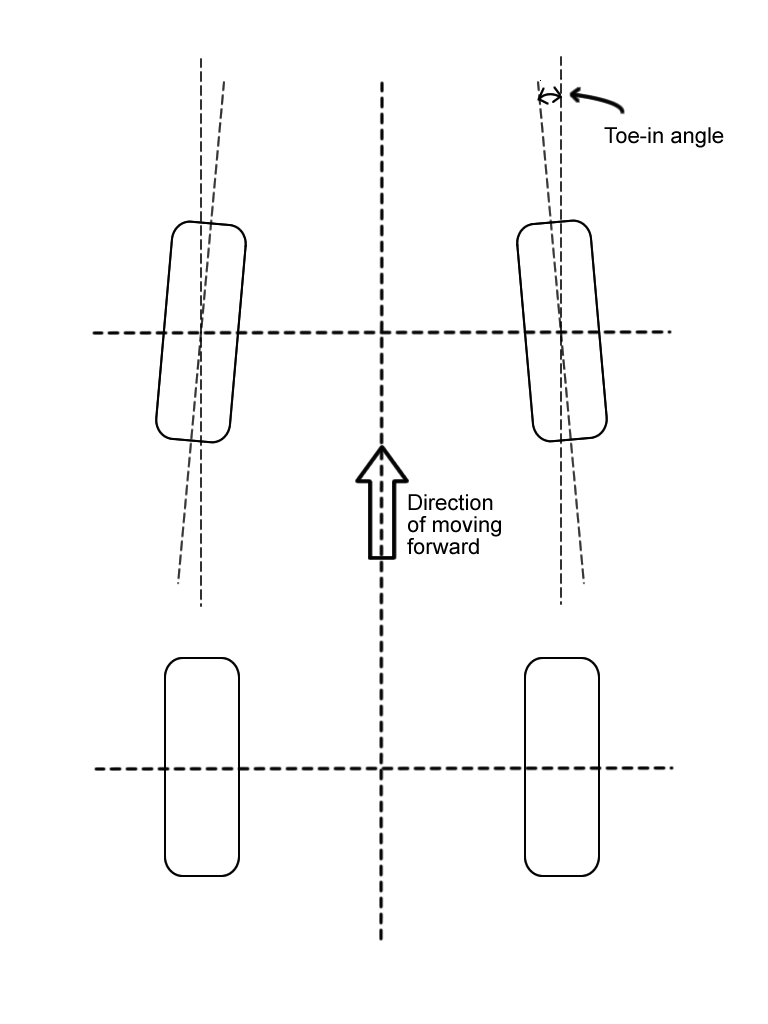
Angle de convergència
Silverxxx, CC BY-SA 3.0 <https://creativecommons.org/licenses/by-sa/3.0>, via Wikime
L’angle de convergència és, vist des d’un punt de vista immediatament superior al vehicle, el que presenten les rodes respecte l’eix longitudinal del pla i ha de ser el mateix en cada roda. Si els eixos de simetria que passen pel centre de la roda tendeixen a creuar-se per davant del vehicle, es diu que la convergència és positiva; si aquests són paral·lels, és zero i si els eixos es disposen a creuar-se per darrere del cotxe, la convergència és negativa (divergència).
El valor d’obertura de les rodes anirà en funció de varis paràmetres ja que l’objectiu és que les rodes estiguin totalment rectes en el moment en què s’estigui circulant. Els principals factors que poden alterar la convergència són: la càrrega del vehicle, la resistència a l’avanç o el parell aplicat a les rodes per part del motor.
Al parlar de la càrrega, sabem que aquesta comprimeix la suspensió i, en direccions de cremallera, aquest efecte fa variar la longitud de les barres axials de direcció. Aquest canvi en la llargada, acabarà produint una diferència en la convergència en funció de com hagi estat configurada inicialment.

Efecte de la resistència de rodadura
La resistència a la rodadura produirà un efecte d’obertura, degut a un parell que actua des del centre de la petjada del pneumàtic fins al punt de pivot de la roda. Com més gran sigui la distància “d”, més gran serà aquest parell.

Efecte de la Força motriu
En canvi, la força motriu del motor, que va en sentit contrari a la resistència d’avanç, provocarà un parell en sentit invers i tendirà a tancar les rodes, forçant convergència positiva.
Aquests tres punts descrits obeeixen la norma general. La realitat sol ser una mica més complexa, en què el set up de la convergència també ens dependrà de si el vehicle és tracció al davant o posterior i dels angles de caiguda, avanç i sortida.
Angle de Pivot o de sortida (King Pin)

Angle de pivot o de sortida
Mirant-nos el cotxe de cara, l’angle de pivot és el que forma l’eix d’articulació de la mangueta amb la vertical. Es troba en el mateix pla que l’angle de caiguda. L’angle de pivot és clau per determinar l’esforç al girar la direcció i pel mateix autocentrat d’aquesta.
Per tal de donar un cert angle de guiat (girar les rodes), s’ha de vèncer un parell produït per la força de la resistència a la rodadura -que s’aplica al centre de la petjada del pneumàtic amb el terra- i el braç de palanca o distància “d” (veure foto superior). Tal com es pot observar, com major és la inclinació del pivot, més petita serà la distància “d” i, per tant, menor el parell que s’haurà superar per tal de girar el pneumàtic. Si aquesta distància “d” arribés a ser zero, el parell a vèncer seria nul, sent necessari tan sols un petit esforç per moure les rodes. Com a contraposició, tindríem una direcció molt sensible a les irregularitats del terreny. En el suposat cas que la prolongació de l’eix del pivot tallés per l’exterior de les rodes, “d” seria negativa i tindríem una direcció que giraria sola. Per últim, si el braç de palanca fos excessivament llarg, ens trobariem davant d’una direcció molt dura. Es tracta doncs de buscar un equilibri.
Respecte a l’autocentrat de la direcció, si el pivot de la roda està inclinat i nosaltres girem la roda, aquesta voldrà descriure un radi amb la mateixa inclinació, fet que comprimirà la suspensió. L’energia acumulada a la molla-amortiguador, serà la mateixa que tendirà a tornar les rodes a la seva posició original quan es deixi d’exercir força sobre el volant.
Angle d'avanç (Caster)
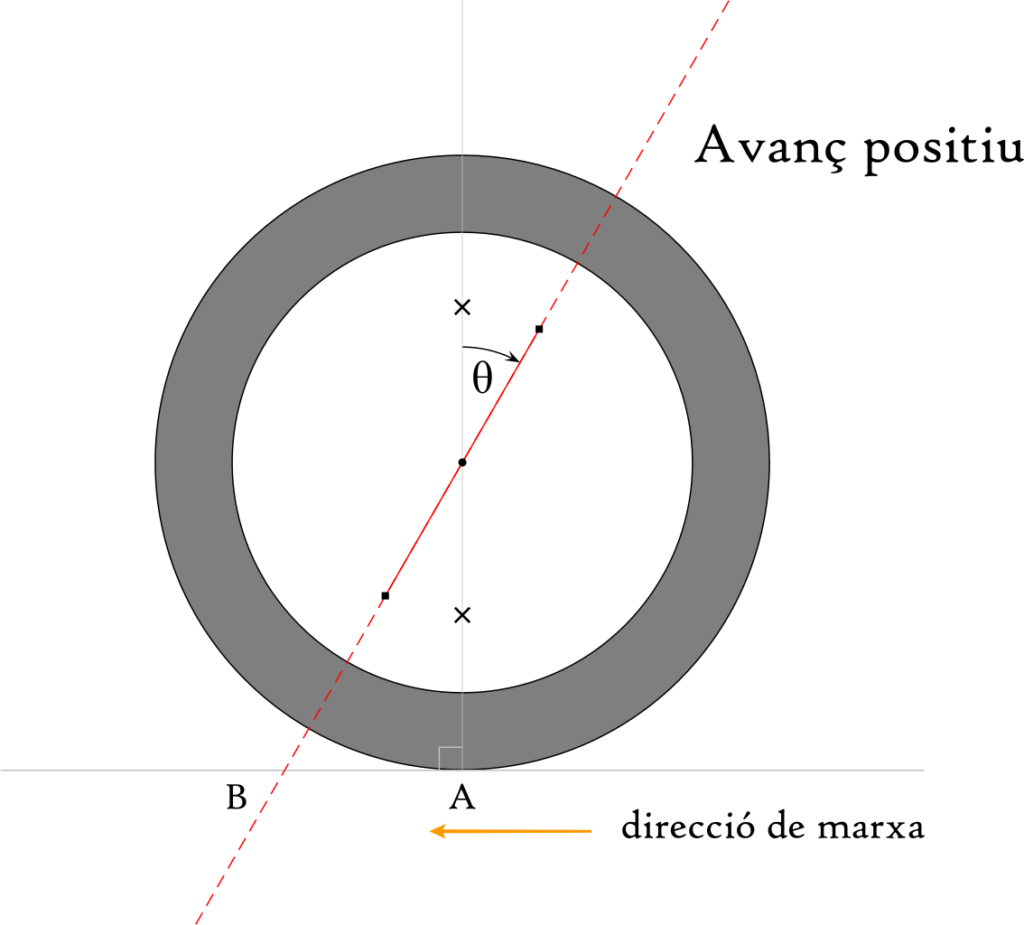
Angle d’avanç
L’angle d’avanç es defineix, vist des del lateral el vehicle, com el que forma la prolongació de l’eix de pivot de la mangueta amb la vertical. La necessitat d’aquesta cota s’explica pel fet d’obtenir un efecte d’alineat a la roda en el sentit de la marxa a causa d’un parell produït per l’impuls del vehicle i la força de fricció en el moment en què s’està girant.
Una inclinació per darrere la vertical (avanç positiu), com el mostrat en la imatge superior, fa que la prolongació de l’eix talli en un punt del terra lleugerament per davant respecte el punt de contacte entre el pneumàtic i la carretera. Degut a la inclinació esmentada, l’impuls del vehicle sobre l’eix d’articulació de la mangueta s’acaba produint en el punt B, per davant de la força de fricció, que actua sobre el punt A. Aquesta configuració generarà un efecte semblant el dels carros de supermercat on la roda quedarà alineada en el sentit de la marxa. És a dir, tot intent de desviar la marxa en línia recta, quedarà anul·lada per el parell impuls-força de fricció. Això proporcionarà fermesa i estabilitat a la direcció.
Amb un avanç excessiu ens trobarem amb una distància entre el punt A i el punt B més gran, que al seu torn, farà augmentar el braç de palanca del parell impuls-força de fricció. Com a conseqüència, tindrem una direcció més dura i una orientació violenta a la sortida de les corbes – quan les rodes retornen a la posició original -. Pel contrari, com menor tendeixi a ser l’angle d’avanç, més tova o mandrosa serà l’acció de girar el volant
Tal i com s’ha comentat a la introducció, es tracta d’una matèria molt extensa en la qual s’han obviat molts punts amb l’objectiu de fer-ho fàcil. Per tant, aquest article ha de servir com a tall d’aproximació i primer contacte amb la temàtica més que no pas una guia detallada amb tots fenòmens que hi intervenen. En tot cas, més endavant ja aprofundirem en els apartats que així ho requereixin.
Felicitats! Supeeer be explicat!!!
Molt complet!!